SmartLab AIFelhasználói élmény — UX és interakció mellékspecializáció a BME-nAz Adattudomány és Mesterséges Intelligencia főspecializáció kiváló kiegészítője a BME VIK-en a UX és interakció mellékspecializáció.Dec 28, 2022Dec 28, 2022
SmartLab AIAdattudomány és Mesterséges Intelligencia MSc főspecializáció a BME-n“Elméleti és gyakorlati MI tudás az ipar igényeihez igazítva” — 2023-tól elindítjuk a BME VIK-en az Adattudomány és Mesterséges…Nov 10, 2022Nov 10, 2022
SmartLab AIPIA project’s achievement at NeurIPS AIDO6Author: Robert Moni, András Kalapos, András Béres, Bence Háromi, Dávid Bárdos, Tibor Áron Tóth, Bálint Gyires-TóthApr 28, 2022Apr 28, 2022
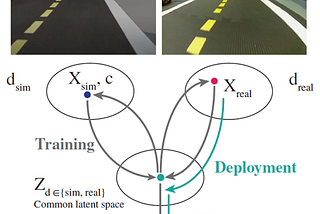
SmartLab AIUsing Transfer Learning to solve the simulator-to-real problem in the Duckietown environmentAuthor: Zoltán LőrinczMar 3, 2021Mar 3, 2021
SmartLab AIDeep Learning-based Semantic Segmentation in Simulation and Real-World for Autonomous Vehicles —…Author: Zsombor TóthFeb 25, 2021Feb 25, 2021
SmartLab AIApply semi-supervised learning for semantic segmentationAuthor: Gábor LantFeb 25, 20211Feb 25, 20211
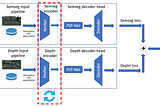
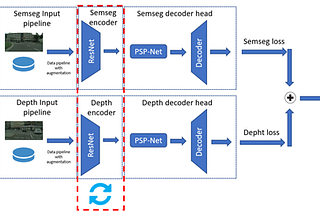
SmartLab AIDisjoint Datasets in Multi-task Learning with Deep Neural Networks for Autonomous DrivingAuthor: Tamás IllésFeb 25, 20211Feb 25, 20211
SmartLab AISupervised and Unsupervised Representation Learning for Reinforcement LearningAuthor: András BéresFeb 25, 2021Feb 25, 2021
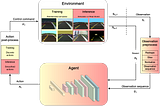
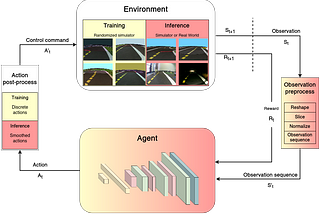
SmartLab AILane following in the Duckietown environment under extreme conditionsAuthor: Péter AlmásiFeb 25, 2021Feb 25, 2021